





.





.





Filmy
-
![Uruchom film]()
Wyniki wyborów na Rektora Uniwersytetu im. Adama Mickiewicza w Poznaniu
-
![11 kwietnia odbył się Międzynarodowy Dzień Uniwersytetów Dziecięcych na UAM. O idei tego dnia opowiada dr Renata Popiołek, koordynatorka projektu Kolorowy Uniwersytet.]()
Międzynarodowy Dzień Uniwersytetów Dziecięcych na UAM
-
![Uruchom film]()
Uniwersytecka Synergia Edukacyjna UAM. Spotkanie trzecie: specjalne potrzeby edukacyjne
-
![Uruchom film]()
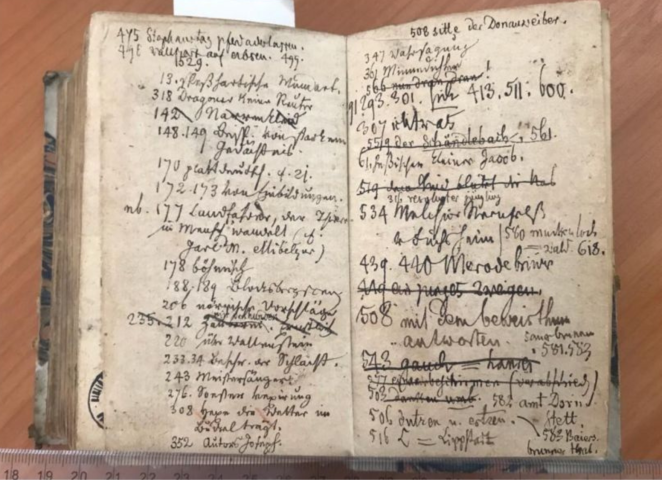
Uczeni Uniwersytetu Poznańskiego wobec kwestii żydowskiej w okresie dwudziestolecia międzywojennego
-
![22-23 marca 2024 r. na Wydziale Historii UAM odbyły się obchody Dnia Czytania Tolkiena, zorganizowane we współpracy z Drużyną Pyrlandii.]()
Dzień Czytania Tolkiena w Poznaniu



.
.



.
.
.
.
-
 IEP-evaluated-logo600.png
IEP-evaluated-logo600.png -
 Europe.png
Europe.png -
 Logo-Small-size@4x.png
Logo-Small-size@4x.png